goroutine生命周期中包含了各种状态的变换,弄清楚了这些状态及状态切换的原来,对搞清楚go调度器会非常有帮助。
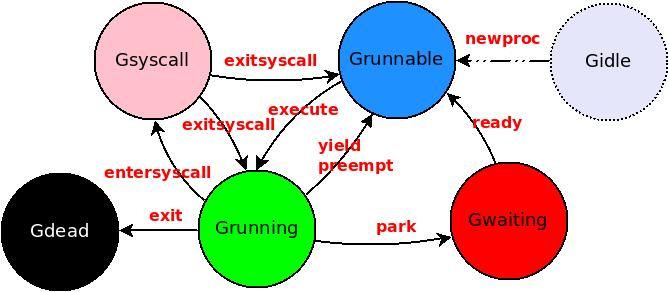 Gidle在go调度器没有真正被用到所以忽略。runtime创建goroutine,就会将其状态设置为Grunnable并加入到任务队列中。所以从Grunnable开始介绍
Gidle在go调度器没有真正被用到所以忽略。runtime创建goroutine,就会将其状态设置为Grunnable并加入到任务队列中。所以从Grunnable开始介绍
1. Grunnable
goroutine在下列几种情况会设置为Grunnable状态:
1.1 创建goroutine
在go中,包括用户入口main.mian在内的所有goroutine都是通过runtime.newproc->runtime.newproc1创建的,前者是对后者的一层封装。go关键字最终会被编译器映射为对runtime.newproc的调用。当runtime.newproc1完整资源分配及初始化后,新任务的状态会被置为Grunnable,然后被添加到当前P的本地任务队列中。
1
2
3
4
5
6
7
8
9
10
11
12
13
|
func newproc1(fn *funcval, argp unsafe.Pointer, narg int32, callergp *g, callerpc uintptr) {
// --snip--
// 获取当前g所在的p,从p中创建一个新g(newg)
_p_ := _g_.m.p.ptr()
newg := gfget(_p_)
// --snip--
// 设置Goroutine状态为Grunnable
casgstatus(newg, _Gdead, _Grunnable)
// --snip--
// // 新创建的g添加到run队列中
runqput(_p_, newg, true)
// --snip--
}
|
1.2 阻塞任务唤醒
当某个阻塞任务(Gwaiting)的等待条件满足而被唤醒时。(如g1项channel写入数据将唤醒等待接收的),g1通过调用runtime.ready将g2状态重新置为Grunnable并添加到任务队列中。关于groutine阻塞,还有更详细的介绍。
1
2
3
4
5
6
7
8
9
10
|
func ready(gp *g, traceskip int, next bool) {
// --snip--
// 获取current g
_g_ := getg()
// 将状态从Gwaiting转换至Grunnable
casgstatus(gp, _Gwaiting, _Grunnable)
// 添加到运行队列中
runqput(_g_.m.p.ptr(), gp, next)
// --snip--
}
|
1.3 其他
另外的路径是从Grunning和Gsyscall状态转换到Grunnable,后面再介绍。总之处于Grunnable的任务一定是在某个任务队列中,随时等待被调度执行。
Grunning
所有状态为Grunnable的任务都可能通过findrunnable函数被调度器(P&M)获取,进而通过execute将其状态切换到Grunning,最后调用runtime.gogo加载context并执行。
1
2
3
4
5
6
7
8
9
10
11
|
// One round of scheduler: find a runnable goroutine and execute it.
// Never returns.
func schedule() {
// --snip--
// 挑一个可运行的g,并执行
if gp == nil {
gp, inheritTime = findrunnable() // blocks until work is available
}
// --snip--
execute(gp, inheritTime)
}
|
1
2
3
4
5
6
7
8
9
10
11
12
|
// Schedules gp to run on the current M.
func execute(gp *g, inheritTime bool) {
// 将当前g的M切换到新的g上
_g_ := getg()
_g_.m.curg = gp
gp.m = _g_.m
// 将Grunnable状态变更为Grunning
casgstatus(gp, _Grunnable, _Grunning)
// --snip--
// 真正执行goroutine
gogo(&gp.sched)
}
|
go采取的是一种协作式调度方案,一个正在运行的任务,需要通过yield的方式显式的让出处理器。
在Go1.2之后,runtime也支持一定程度的任务抢占–当系统线程sysmon发现某个任务执行时间过长或者runtime判断需要进行垃圾收集时,会将任务置为“可被抢占”的,当该任务下一次函数调用时,就会让出处理器并重新切换到Grunnable状态。
Gsyscall
Go运行时为了保证高的并发性能,当会在任务执行OS系统调用前,先调用runtime.entersyscall函数将自己的状态置为Gsyscall(如果系统调用是阻塞式的或者执行过久,则将当前M与P分离),当系统调用返回后,执行线程调用runtime.exitsyscall尝试重新获取P,如果成功且当前任务没有被抢占,则将状态切换回Grunning并继续执行;否则将状态置为Grunnable,等待再次被调度执行。
1
2
3
4
5
6
7
8
9
10
11
12
|
func reentersyscall(pc, sp uintptr) {
_g_ := getg()
// --snip--
casgstatus(_g_, _Grunning, _Gsyscall)
// --snip--
// 将m和p分离
pp := _g_.m.p.ptr()
pp.m = 0
_g_.m.oldp.set(pp)
_g_.m.p = 0
// --snip--
}
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
|
func exitsyscall() {
_g_ := getg()
// --snip--
// 如果P还存在则重新获取P
if exitsyscallfast(oldp) {
// --snip--
casgstatus(_g_, _Gsyscall, _Grunning)
// --snip--
return
}
// --snip--
// 如果P不存在则Gsyscall->Grunnable
mcall(exitsyscall0)
// --snip--
}
|
Gwaiting
当一个任务需要的资源或运行条件不能被满足时,需要调用runtime.park函数进入该状态,之后除非等待条件满足,否则任务将一直处于等待状态不能执行。除了之前举过的channel的例子外,Go的定时器,网络io操作,原子,信号量都可能引起任务的阻塞。
1
2
3
4
5
6
|
// park continuation on g0.
func park_m(gp *g) {
// --snip--
casgstatus(gp, _Grunning, _Gwaiting)
// --snip--
}
|
1
2
3
4
|
func gopark(unlockf func(*g, unsafe.Pointer) bool, lock unsafe.Pointer, reason waitReason, traceEv byte, traceskip int) {
// --snip--
mcall(park_m)
}
|
runtime.park中lock是goroutine阻塞时需要释放的锁,(比如channel),reason是阻塞的原因,方便gdb调试。当所有任务处于Gwaiting状态时,也就表示当前程序进入了死锁状态,那么runtime回检测到这种情况,并输出所有Gwaiting任务的backtrace信息。
Gdead
当一个任务执行结束后,会调用runtime.goexit结束。将状态置为Gdead,并进入当前P的gFree列表。
 times read
times read